



Ứng dụng công nghệ UAV xây dựng mô hình số bề mặt và bình đồ ảnh; thực nghiệm tại phường Hùng Thắng, thành phố Hạ Long, tỉnh Quảng Ninh
26/04/2022TN&MTThành lập mô hình số bề mặt và bình đồ ảnh bằng công nghệ máy bay không người lái (UAV) đã được ứng dụng trong một số công trình do một số ưu điểm như độ chính xác cao, linh hoạt thời gian, hiệu quả kinh tế cao. Tuy nhiên, quy trình thực hiện và việc đánh giá độ chính xác còn chưa thống nhất và đồng bộ. Nghiên cứu này được thực hiện với mục tiêu: 1/tổng quát quy trình thành lập mô hình số bề mặt và bình đồ ảnh từ ảnh máy bay không người lái, 2/bay đo thử nghiệm và đánh giá độ chính xác mô hình số bề mặt được xây dựng bằng công nghệ UAV. Kết quả xử lý ảnh bay đo thử nghiệm khu vực phường Hùng Thắng, TP. Hạ Long, tỉnh Quảng Ninh cho thấy: Sản phẩm mô hình số bề mặt và bình đồ ảnh hoàn toàn đáp ứng được thành lập bản đồ tỷ lệ 1/500 và nhỏ hơn.
Quy trình thành lập mô hình số bề mặt và bình đồ ảnh từ ảnh máy bay không người lái
Thành lập mô hình số bề mặt và bình đồ ảnh từ ảnh chụp bề mặt trái đất nói chung và máy bay không người lái nói riêng dựa trên phép chiếu xuyên tâm ảnh và mô hình lập thể. Do đó, bên cạnh công tác chụp ảnh là xây dựng lưới khống chế ảnh để bình sai, định hướng ngoài và đưa khối ảnh về tọa độ theo yêu cầu. Quy trình thực hiện bay đo trong đề tài được xây dựng dựa trên tổng hợp các nghiên cứu đã thực hiện trong và ngoài nước (Pix4D SA 2016; Ngô et al. 2017; Clapuyt, Vanacker, and Van Oost 2016; Tong et al. 2017; Stocker et al. 2017; Tống et al. 2018; S 1989). Ba nhóm nhiệm vụ trước tiên thực hiện là thiết kế lưới khống chế, xin phép bay, và thiết kế bay chụp ảnh. Trong đó các bước thiết kế, đo khống chế, bay chụp và trình tự xử lý số liệu đã được trình bày cụ thể, chi tiết trong các nghiên cứu trước đây (Koeva et al. 2016; Bùi et al. 2016; Pix4D SA 2016). Hình 1 là quy trình xây dựng mô hình số về mặt và bình đồ ảnh.
Hình 1. Quy trình thành lập mô hình số bề mặt và bình đồ ảnh từ ảnh máy bay không người lái

Đặc điểm khu bay đo thử nghiệm và thiết bị sử dụng
Khu đo thử nghiệm được xác định với diện tích 1 km2 nằm trực thuộc phường Hùng Thắng, TP. Hạ Long, tỉnh Quảng Ninh. Khu bay đo nằm trong phạm vi từ 2006’57” - 2007’30” vĩ độ Bắc và từ 107000’31” - 107001’07” kinh độ Đông. Đây là khu vực có một phần đã xây dựng theo cấu trúc đô thị mới ở phía Đông Nam và một phần đang xây dựng ở phía Tây Nam với các khu biệt thự liền kề và các chung cư cao tầng mới. Khu vực này cũng bao gồm các khu dân cư cũ có kiến trúc theo đô thị kiểu cũ với nhà ở dày đặc và hệ thống giao thông nhiều đường nhỏ. Phía Tây Bắc là khu vực các dịch vụ công cộng, vui chơi giải trí với hệ thống cây xanh đặc trung và có khu vực nước mặt rộng lớn ở phía Tây thích hợp cho các hoạt động du lịch, vui chơi hoặc nghỉ dưỡng.
Hệ thống giao thông chính dọc theo phía Bắc khu vực là trục giao thông ven biển chính ở khu vực Bãi Cháy phục vụ cho các hoạt động kinh tế xã hội chủ yếu của khu vực. Đặc thù của khu vực này bào gồm rất nhiều Hồ nước mặt xen kẽ tạo cho đô thị một nét riêng mà người dân và du khách đặc biệt quan tâm khi phát triển thành đô thị thông minh cho khu vực này.
Hai hệ thống thiết bị tân tiến được sử dụng trong nghiên cứu này là thiết bị bay chụp ảnh đồng bộ Phantom 4 Pro và bộ máy đo GPS động 2 tần số Huace RTK X91. Ngoài thiết bị phần cứng, nghiên cứu còn sử dụng phần mềm thương mại Pix4D bản dùng thử và phần mềm xử lý ảnh chuyên dụng Agisoft Metashape để xử lý ảnh đã bay đo.
Kết quả
Kết quả đo khống chế và bay chụp ảnh: Các điểm khống chế (KCA) và điểm kiểm tra (KT) được đo đạc xác định tọa độ bằng công nghệ GNSS/RTK với độ chính xác đạt được là ± 3 cm. Theo phương pháp này, máy Base sẽ được đặt tại điểm mốc khống chế cơ sở của khu vực đo vẽ. Các máy rover được đặt đo tại các điểm KCA và KT với tần số thu tín hiệu là 15”/điểm. Máy rover có kẹp sào giữ thẳng và ổn định suốt thời gian đo. Các điểm đo được đánh dấu trên thực địa bằng các tiêu đo hình chữ thập in trên tấm nhựa kích thước 50x50 cm. Phương thức đo động xử lý tức thời (RTK) được thực hiện nhằm đánh giá nhanh chất lượng đo khống chế. Để đảm bảo độ chính xác cho mô hình số bề mặt, cần bố trí các điểm khống chế ảnh trên khu vực đo vẽ. Tổng số điểm KCA là 16 và số điểm KT là 11 Các điểm được bố trí đều trên khu vực đo vẽ. Việc bố trí các điểm cần đảm bảo dễ dàng tiếp cận, và không gian phía trên thông thoáng, thuận lợi cho đo đạc tọa độ bằng công nghệ GNSS/RTK, cũng như không bị che khuất trên ảnh chụp bằng UAV.
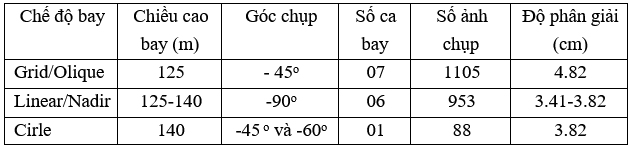
Bay chụp ảnh máy bay không người lái và đo khống chế ảnh được thực hiện trong 1 ngày từ 10h00’ đến 16h00’ ngày 9/7/2021. Thời tiết trong suốt thời gian đo rất tốt, trời nắng đẹp, quang mây mây, độ ẩm 66%, nhiệt độ từ 35-37 oC, gió Đông Nam vận tốc 2.4 m/s. Để phủ kín khu vực bay thử nghiệm cần thực hiện 07 ca bay theo phương pháp Grid/Olique và 6 ca bay theo phương pháp Linear/Nadir với góc chụp lần lượt là 900 và 450 độ phủ 80%. Bên cạnh đó, khu vực có 1 tòa nhà cao tầng 45 tầng được bay chụp bằng chế độ Circle, số ảnh chụp thu được là 88 ảnh với nhiều góc chụp ảnh khác nhau. Kết quả công tác bay chụp được tóm tắt như trong Bảng 1.
Bảng 1. Bảng tóm tắt kết quả bay chụp ảnh UAV thành lập bản đồ 3D
Kết quả xử lý ảnh bay đo
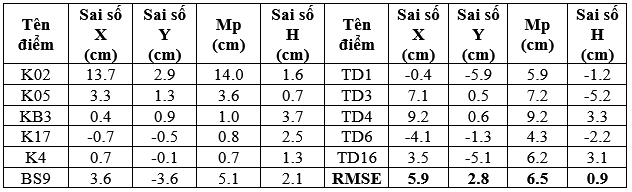
Việc xử lý ảnh thành lập mô hình số bề mặt và bình đồ ảnh được thực hiện trên phần mềm xử lý ảnh chuyên dụng Agisoft Metashape. Độ chính xác của mô hình số bề mặt và bình đồ ảnh được thể hiện thông qua độ chính xác mô hình đám mây điểm. Độ chính xác này được đánh giá thông qua 11 điểm kiểm tra. Kết quả được thể hiện cụ thể như Bảng 2.
Bảng 2. Bảng kết quả đánh giá độ chính xác đám mây điểm khu vực thực nghiệm thông qua các điểm kiểm tra (CP)
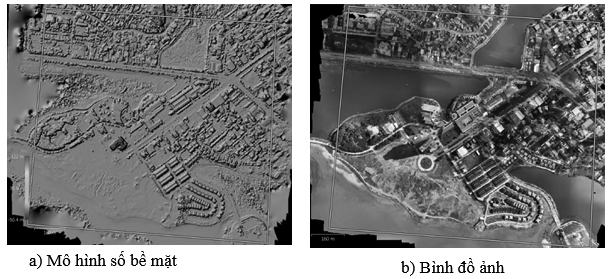
Các sản phẩm thu được của quá trình xử lý ảnh UAV bao gồm: Mô hình số bề mặt và ảnh trực giao (Hình 2).
Hình 2. Mô hình số bề mặt (a) và bình đồ ảnh (b) khu vực thực nghiệm được xây dựng từ ảnh UAV
Kết luận
Phương pháp bay chụp kết hợp phương pháp Grid/Olique, phương pháp Linear/Nadir với phương pháp Circle ở các độ cao khác nhau, góc chụp khác nhau đã thu thập được nhiều ảnh ở nhiều góc độ khác nhau, từ đó giúp xây dựng được mô hình số bề mặt và bình đồ ảnh tốt nhất. Phương pháp kết hợp này đảm bảo cơ sở khoa học, cân đối kinh phí và đáp ứng khả năng thiết bị cũng như phù hợp với đặc điểm các đối tượng bề mặt tại khu vực bay đo là khu đô thị thuộc phường Hùng Thắng, TP. Hạ Long, tỉnh Quảng Ninh. Độ chính xác của mô hình số bề mặt được đánh giá qua 11 điểm kiểm tra đã cho độ chính xác đạt yêu cầu với RMSE =0,9.
Phương án đo tọa độ điểm khống chế bằng công nghệ RTK là phù hợp và nên được khuyến cáo khi sử dụng công nghệ UAV cho thành lập mô hình số bề mặt và bình đồ ảnh. Bản chất của phương pháp xây dựng mô hình số bề mặt và bình đồ ảnh dựa trên phép chiếu xuyên tâm và mô hình lập thể (Tống et al. 2018). Do vậy, với khu vực đô thị có nhà cao tầng thì việc bay chụp ở các độ cao khác nhau là phù hợp và cần thiết.
Độ chính xác của mô hình số bề mặt và bình độ ảnh cho thấy việc sử dụng máy bay không người lái có thể thành lập bản đồ địa hình tỷ lệ lớn 1:500 với giá thành thấp và độ chính xác cao.
Lời cảm ơn
Bài báo được hỗ trợ dữ liệu và kinh phí từ đề tài KHCN cấp Bộ TN&MT: Nghiên cứu ứng dụng công nghệ địa không gian xây dựng dữ liệu không gian địa lý 3D cho thành phố thông minh ven biển phù hợp với điều kiện Việt Nam, thí điểm tại khu vực TP. Hạ Long, tỉnh Quảng Ninh, mã số: TNMT.2021.04.04.
Tài liệu tham khảo
1. Bùi, Tiến Diệu, Cẩm Vân Nguyễn, Mạnh Hùng Hoàng, Bích Phương Đồng, Việt Hà Nhữ, Trung Anh Trần, and Quang Minh Nguyễn. 2016. "Xây dựng mô hình số bề mặt và bản đồ trực ảnh sử dụng công nghệ đo ảnh máy bay không người lái (UAV)." In Hội nghị Khoa học: Đo đạc Bản đồ với ứng phó biến đổi khí hậu, 1-17. Hà Nội;
2. Clapuyt, Francois, Veerle Vanacker, and Kristof Van Oost. 2016. "Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms", Geomorphology, 260: 4-15;
3. Koeva, M., M. Muneza, C. Gevaert, M. Gerke, and F. Nex. 2016. "Using UAVs for map creation and updating. A case study in Rwanda", Survey Review: 1-14;
4. Ngô, Thị Phương Thảo, Tiến Diệu Bùi, Trọng Minh Mai, Quang Khánh Nguyễn, Tuấn Anh Nguyễn, Hùng Long Ngô, and Quốc Long Nguyễn. 2017. 'Đánh giá độ chính xác mô hình số bề mặt và bản đồ ảnh trực giao thành lập từ phương pháp ảnh máy bay không người lái (UAV)', Tạp chí Khoa học Kỹ thuật Mỏ- Địa chất, 58: 18-27;
5. Pix4D SA. 2016. "Pix4D mapper 2.1 user manual" In. Switzerland: Pix4D;
6. S, Aronoff. 1989. Geographical Information Systems: A Management Perspective (Publications, Ottawa);
7. Stocker, Claudia, Rohan Bennett, Francesco Nex, Markus Gerke, and Jaap Zevenbergen. 2017. 'Review of the Current State of UAV Regulations', Remote Sensing, 9: 459;
8. Tong, Si Son, Vu Giang Nguyen, Phan Long Vu, Quang Toan Le, Thi Huyen Ai Tong, Huu Long Vu, Viet Hoa Pham, Tien Dien Vu, and Van Chat Vu. 2017. "Accuracy assessment of uav photogrammetry for mapping mangrove forest: case study in Xuan Thuy national park, Vietnam." in Quoc Long Nguyen, Thi Lan Pham, Viet Nghia Nguyen, The Hung Khuong, Thi Thu Ha Le and Phu Hien La (eds.), Geo-spatial technologies and earth resources (GTER 2017) (Publishing House for Science and Technology);
9. Tống, Sĩ Sơn, Thị Huyền Ái Tống, Việt Hòa Phạm, Phan Long Vũ, and Vũ Giang Nguyễn. 2018. "Nghiên cứu đề xuất quy trình bay chụp và thử nghiệm thành lập mô hình số bề mặt địa hình và bình đồ ảnh từ ảnh máy bay không người lá", Tạp chí Khoa học Đo đạc và Bản đồ: 44-51.
PHẠM THỊ LÀN, NGUYỄN VĂN TRUNG, LÊ THỊ THU HÀ
Đại học Mỏ - Địa chất
TỐNG SĨ SƠN
Đại học Khoa học và Công nghệ Hà Nội


Tin liên quan

Tin Gió mùa Đông Bắc tăng cường ngày 13/12: Bắc Bộ và Bắc Trung Bộ trời rét đậm, có nơi rét hại

Mối đe dọa khô hạn khắp hành tinh

Quảng Ngãi kiến nghị hỗ trợ 1.280 tỷ đồng khắc phục hậu quả thiên tai, sạt lở

Ngăn chặn sản xuất không bảo đảm điều kiện môi trường
Phó Thủ tướng Trần Hồng Hà chủ trì cuộc họp phân ban Việt Nam của Uỷ ban liên Chính phủ Việt Nam-Liên bang Nga

Thủ tướng: Chống chạy chọt, lợi ích cá nhân trong tinh gọn bộ máy

Diễn đàn “Công nhân lao động vì môi trường 2024”: Lan tỏa sáng kiến xanh, bảo vệ môi trường

Bộ trưởng Đỗ Đức Duy gửi thư chúc mừng ngày truyền thống Ngành Đo đạc và Bản đồ Việt Nam









